PID tuning is the more complicated and less understood task in the FPV racing community. Although stock, default, PID values give an OK flying characteristic, I strongly suggest putting the effort into understanding how to tuning works.
This post will not cover PID tuning, but HOW-TO tune your PIDs in the air, using your remote. This will help make the process much easier and faster!
The very short way
Go to CLI tab on cleanflight, paste the below code in the command line and press ENTER:
adjrange 0 0 1 900 1300 15 2
adjrange 1 0 1 1300 1700 16 2
adjrange 2 0 1 1700 2100 17 2
adjrange 3 1 1 900 1300 18 3
adjrange 4 1 1 1300 1700 19 3
adjrange 5 1 1 1700 2100 20 3
save
settings for PID tuning in the Air
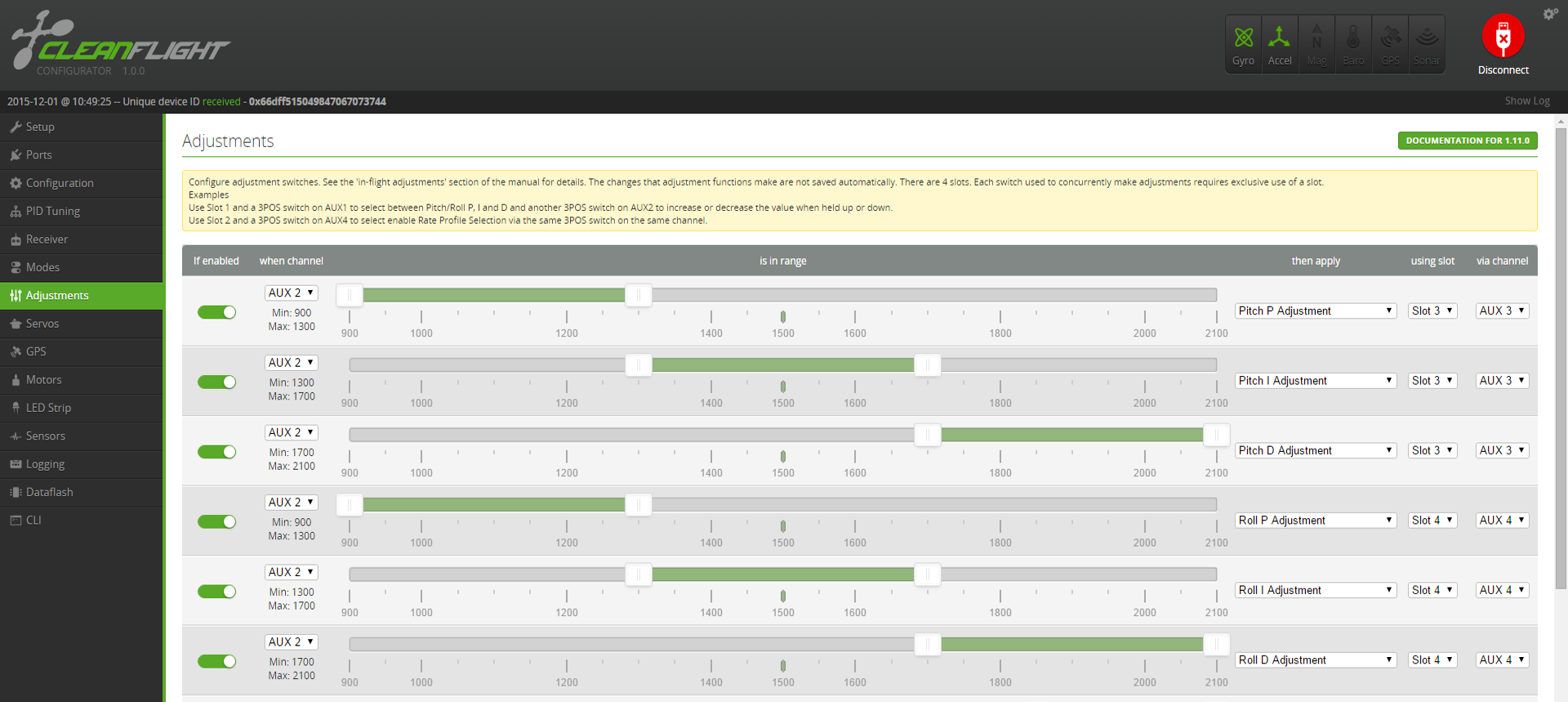
On cleanflight configurator head to the Adjustment tab and set up AUX2, AUX3 and AUX4 as pictured below:

These settings will allow to use your transmitter to change the roll and pitch PIDs, while in flight.
AUX2, will control weather P (low), I (mid) or D (high) are being changed.
AUX3, will increase (high) and decrease (low) (mid – no change) the Pitch PIDs in relation to AUX2 position.
AUX4, will increase (high) and decrease (low) (mid – no change) the Roll PIDs in relation to AUX2 position.
Example
To change Roll D rate: AUX2 - High (To apply changes to D). AUX4 will be moved to high or low to increase or decrease D rate.
Now, map 3 switches on your transmitter to channels 6-8 and tune away 🙂
I recommend:
- AUX2 – SB – ch.6
- AUX3 – SG – ch.7
- AUX4 – SE – ch.8

Can this system be used with pots on remote as variable tuning tools versus switches? Just tune settings then lock them in as values? Thanks.
You can use pots as well, but they will still act as “switches”. The PID options work as follow: Switch high, move pid up, switch low, move pid down.
Nice 🙂
For quick configuration just enter the following code to the CLI and SAVE.
adjrange 0 0 1 900 1200 15 2
adjrange 1 0 1 1350 1650 16 2
adjrange 2 0 1 1800 2100 17 2
adjrange 3 1 1 900 1200 18 3
adjrange 4 1 1 1350 1650 19 3
adjrange 5 1 1 1800 2100 20 3